Previous ASME Award Winner
Recent Departmental Runner Up Awards
Capstone Design Projects
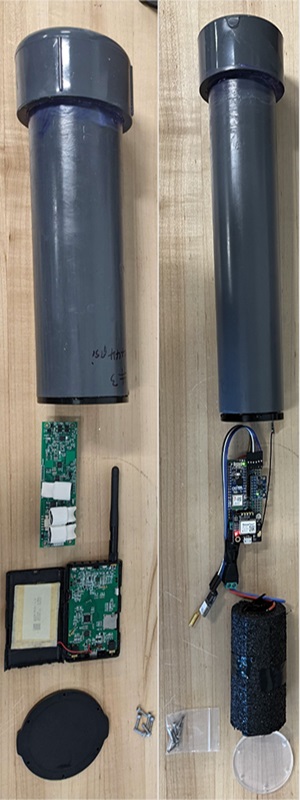
Sub Sea Sonics
2023-2024 - Winter
Team: 11
Kidney Transplant Pump
2023-2024 - Spring
Team: 16


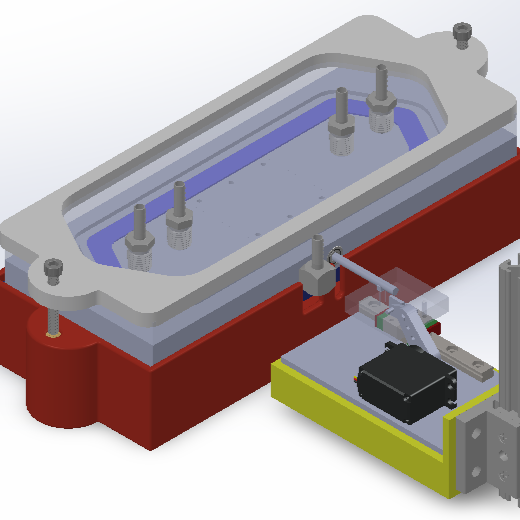
Neuroscience Accessory for Mice Brain Transverse Hippocampus Section
2023-2024 - Spring
Team: 11
Team Members
Diego Gonzalez
Elise Rehder
Griffith Nguyen
Sandra Naranjo-Heredia
Sydney Tom

KickEase Pediatric Swim Trainer
2023-2024 - Winter
Team: 7


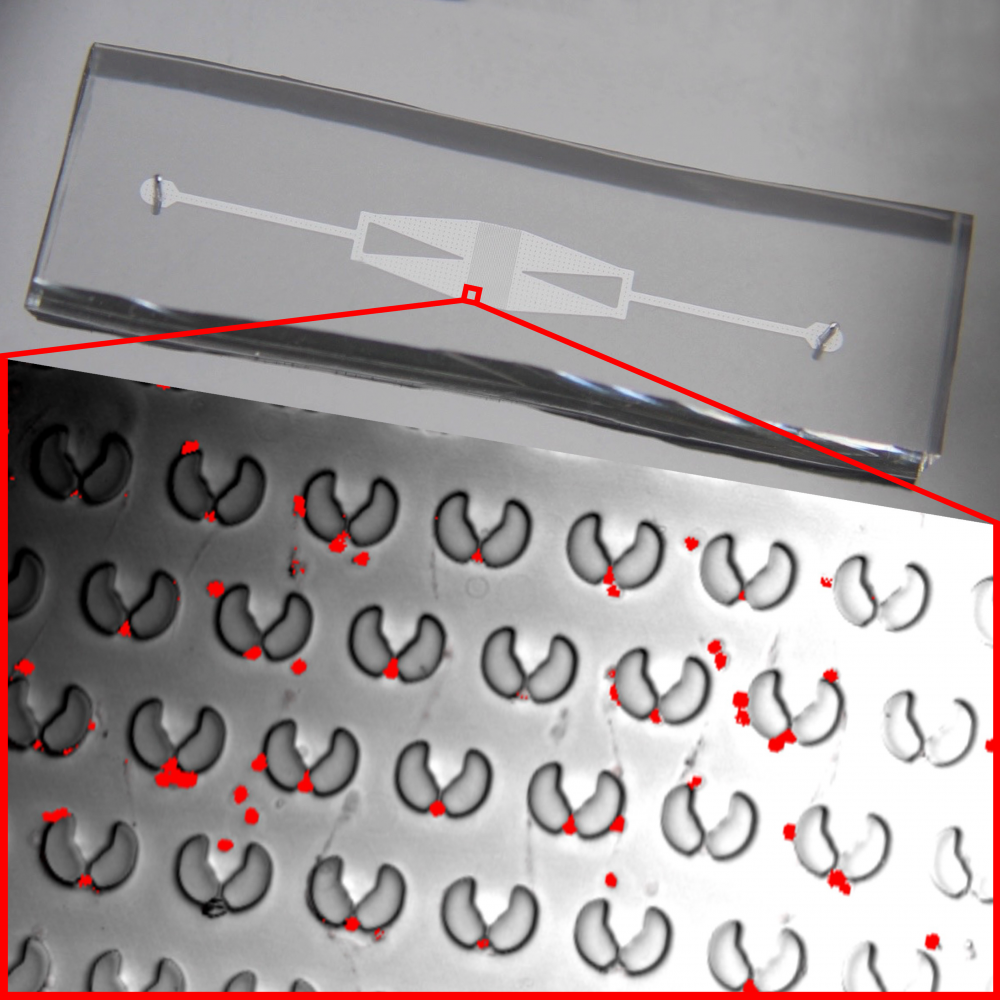
Single-Cell Microfluidic Chip Design and Fabrication
2023-2024 - Spring
Team: 8
Team Members
Conor Archdeacon
Theo Emery
Wesley Huszarik
Spencer Martin
Trevor Matthews
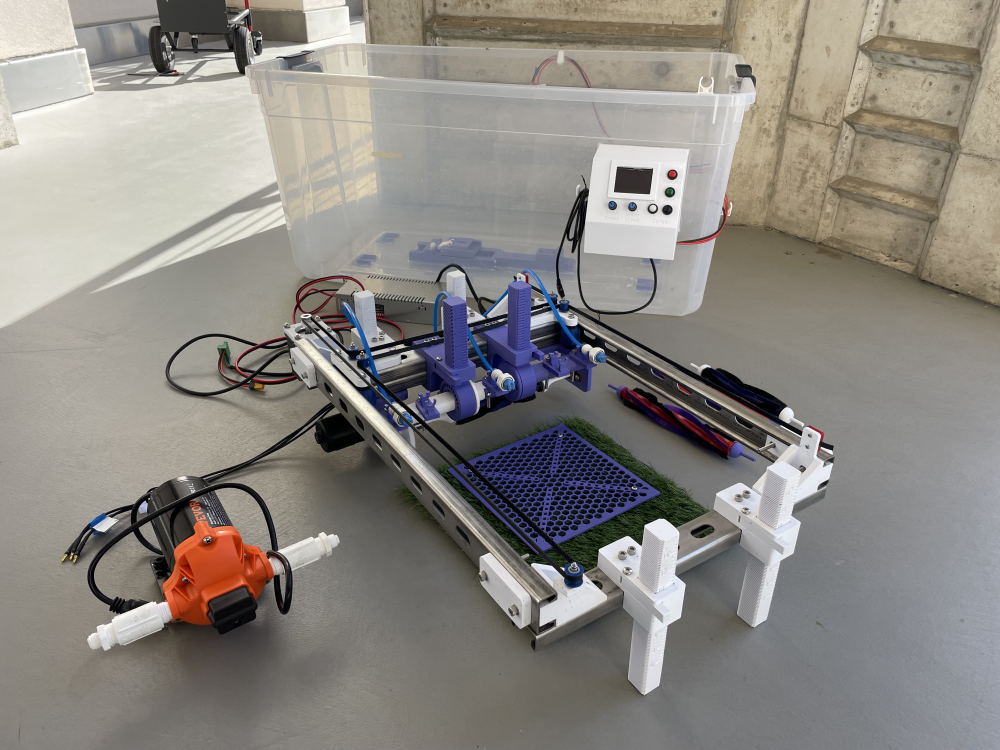
Solar Cell Lamination Automation
2023-2024 - Spring
Team: 7
Precision Jacket for Photoacoustic Imaging
2023-2024 - Winter

Genetically Modified Mosquito Incubation Box
2023-2024 - Spring
Team: 13
Team Members
Emily Inthavong
Emily Weiner
Keileina Honda
Matthew Amankonah
Samantha Stampfl


Robotic Assistant for Cardiologist
2023-2024 - Spring
Team: 24
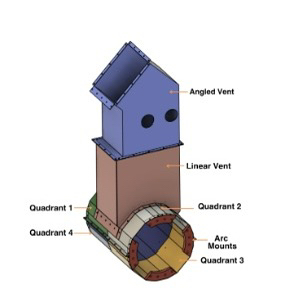
Solar Turbines -Turbine Pre-Swirler
2023-2024 - Winter
Team: 4
Team Members
Team Member 1 - Fernando Acuna
Team Member 2 - Jennifer Duong
Team Member 3 - Richard Montalvo
Team Member 4 - Horacio Ramirez-Nunez

Endotracheal Tube Support Clip
2023-2024 - Spring
Team: 14
Team Members
Jusung Park
Maria Resendiz-Cruz
Michael Usherenko
Madison Whiteman
Brian Yi


BronchoMate
2023-2024 - Spring
Team: 9
Team Members
Chaewon Kim
Ryan Lumaban
Jaden Mcdonald Peltier Yu
Rushil Narain
Alondra Pureco

Development of Cutting Edge Instrumentation for Vision Preserving Surgery
2023-2024 - Winter
Team: 12
Team Members
Hans Chen (www.linkedin.com/in/hans-chen-30b0b6150/)
Joanne Low (www.linkedin.com/in/joanne-low-3b1487205)
Quinn Mullineaux (www.linkedin.com/in/mullineauxq/)
Hanieh Seilsepour (www.linkedin.com/in/hanieh-spr/)

Ultrafast Subpixel Resolution Enhancement
2023-2024 - Spring
Team: 3
Dynamic Stabilization System For Marine Optical Equipment
2023-2024 - Spring
Team: 5

Poseidon's Bidet
2023-2024 - Winter
Team: 9

Project Tortas: Flattened Duct for Engine Build-Up
2023-2024 - Spring
Team: 28


The Grounded Conductive Shield for the Radio Frequency Plasma Source
2023-2024 - Spring
Team: 6
Team Members
Team Member 1 - Haochen Bai
Team Member 2 - Julissa Villalobos Valencia
Team Member 3 - Xiran Wang
Team Member 4 - Ziguang Zhu
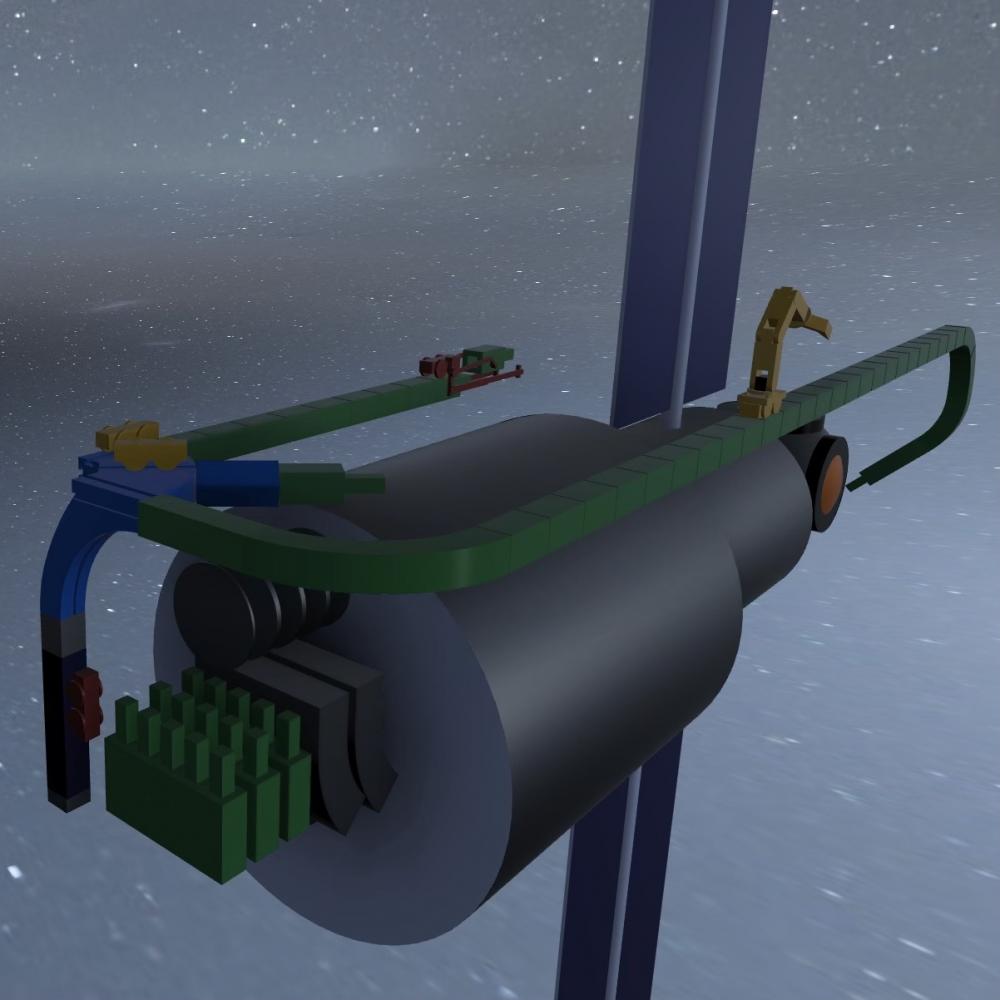
Autonomous Rail Robot Transportation Network for Spacecraft Servicing and Inspection
2023-2024 - Winter
Team: 1
Mechanoluminescent Material
2023-2024 - Spring
Team: 25

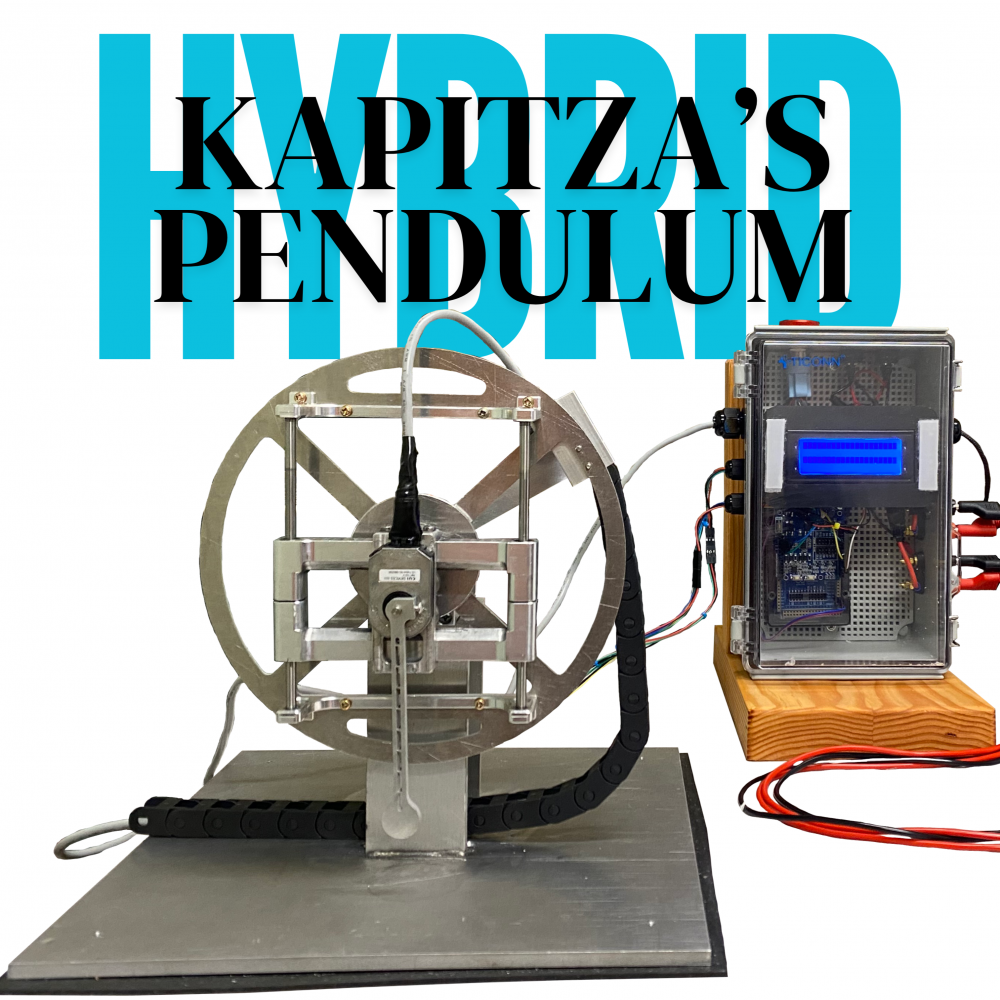
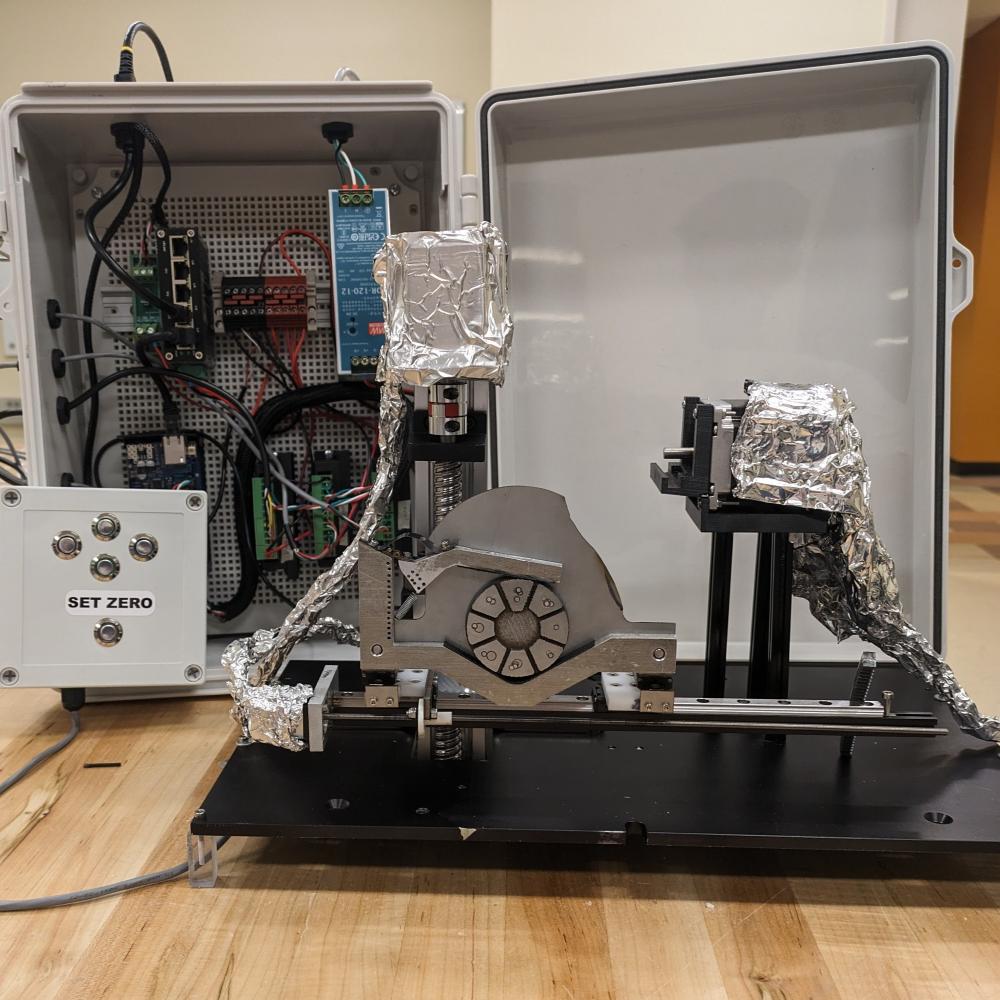
Hybrid Kapitza Pendulum
2023-2024 - Spring
Team: 1
Accessible Enclosure System
2023-2024 - Winter
Team: 5


Enclosed Cell Stretcher
2023-2024 - Spring
Team: 2
Automation of a Glow Discharge Spectrometer
2023-2024 - Spring
Team: 4
Gradwell Drive-By-Wire Go-Kart
2023-2024 - Winter
Team: 3
The project focuses on the mechanical/electrical aspect of the go-kart. The aim was to build a fully electric go-kart that incorporates Drive, Steer, and Brake-by-wire.

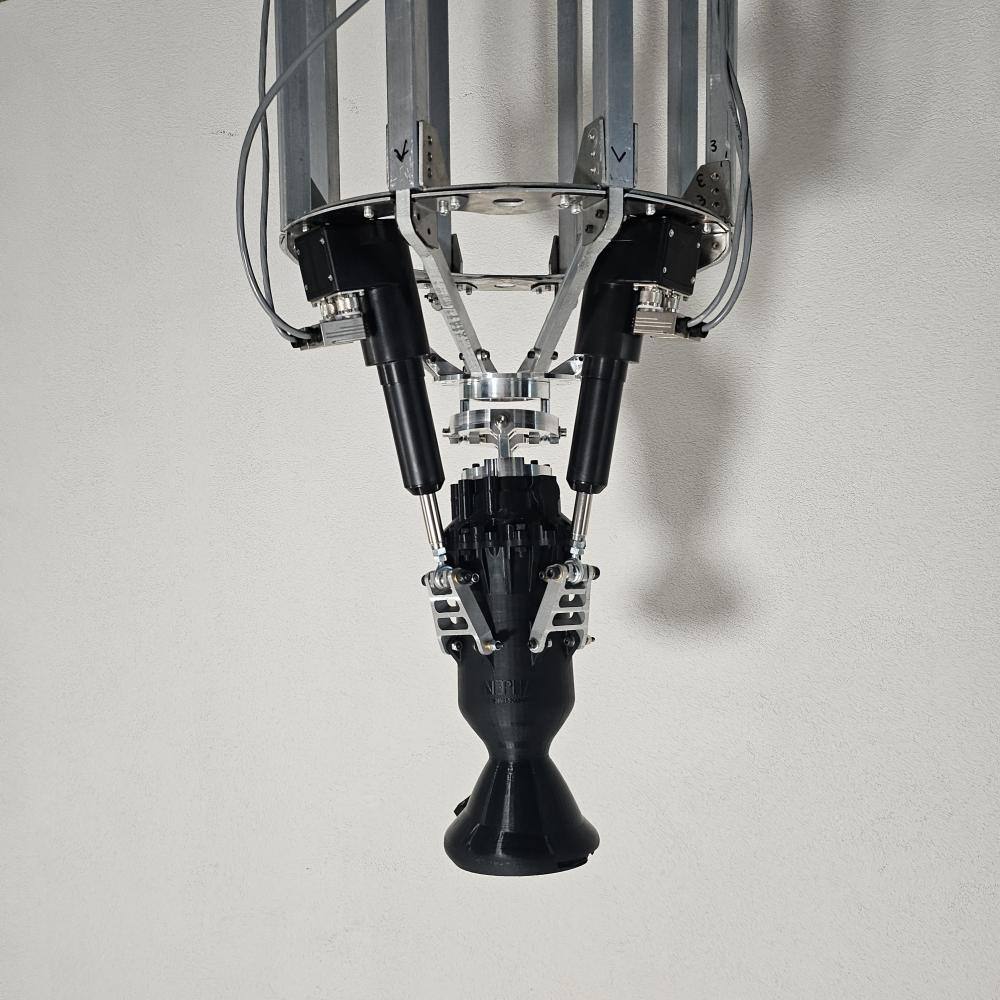
Thrust Vector Control Module for a Rocket Engine
2023-2024 - Spring
Team: 32
Team Members
Omeed Shahhosseini
Setekh Karaismailoglu
Claire Wang
Georgia Prewitt
CRANE 3 - An 8-Axis Robot for Lung Biopsies within CT Scanners
2023-2024 - Spring
Team: 27
Team Members
Arjun Naageshwaran
Muhammand Bintang Gemilang
Brian Fader
Steven Molotnikov

NDT- Endovascular Blood Clot Removal Device
2023-2024 - Spring
Team: 18
Haptic Shoulder for Physical Human Robot Interaction
2023-2024 - Spring
Team: 22
Team Members
Calvin Joyce
Isabella Fiorini
Rizzi Galibut
Roger Nguyen
Tarun Murugesan


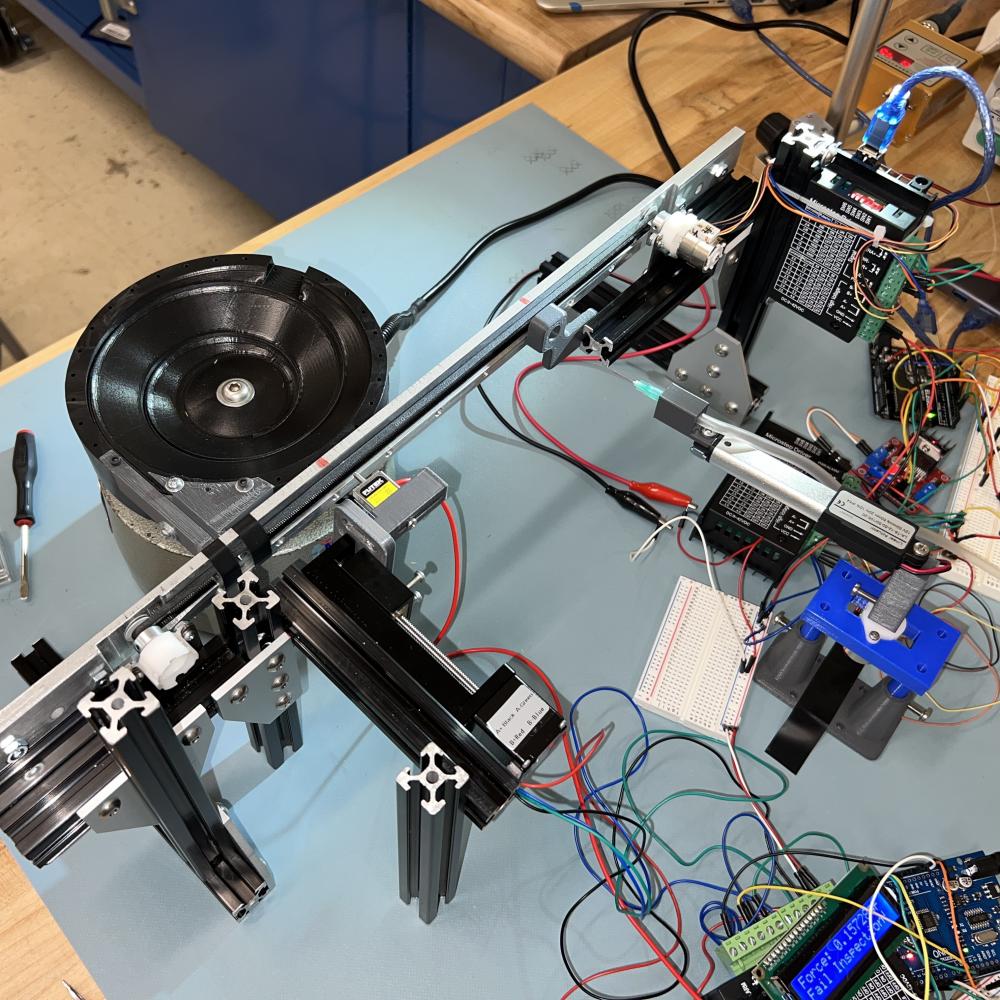
Pogo Pin Inspection Automation
2023-2024 - Winter
Team: 2