
Previous ASME Award Winner
Recent Departmental Runner Up Awards
Capstone Design Projects
Animal Care Processing Project (ACCP)
2024-2025 - Spring
Team: 42

GA - Foam Shell Culling Station
2024-2025 - Winter
Team: 1
Team Members
Tobin Boshaw
Matthew Pope
Collin Huang
Samuel Hasegawa
Kenny Ochoa
Brandon Lopez

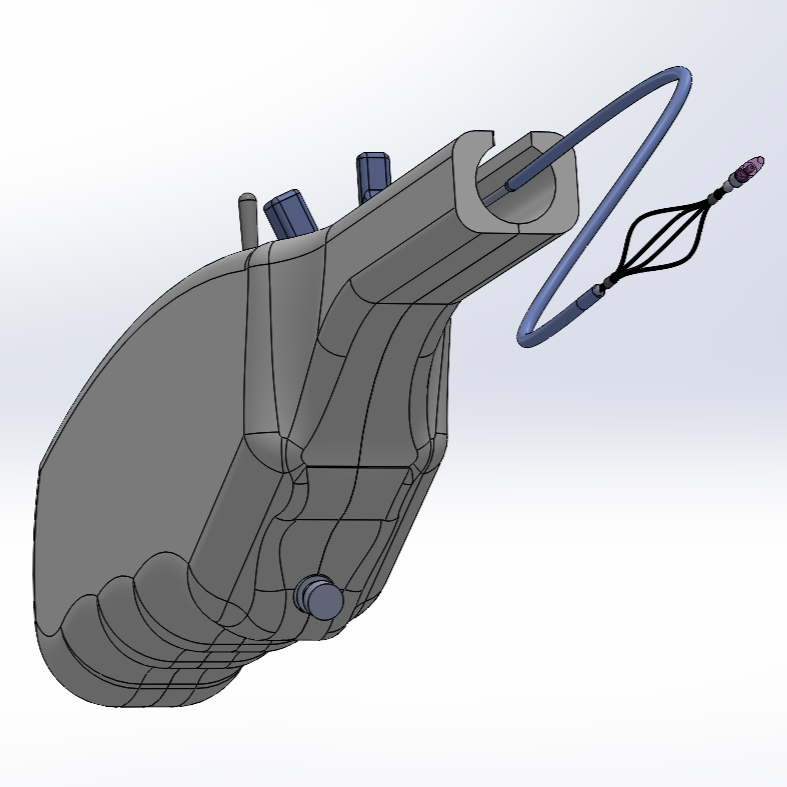
Bidirectional Guide for Treatment of Peripheral Artery Disease
2024-2025 - Spring
Team: 21

Kinetic Craft Center Sign
2024-2025 - Spring
Team: 6


Automated Cognitive Touchscreen Training System for Mice
2024-2025 - Winter
Team: 8

Cell Stretcher 2.0
2024-2025 - Spring
Team: 29
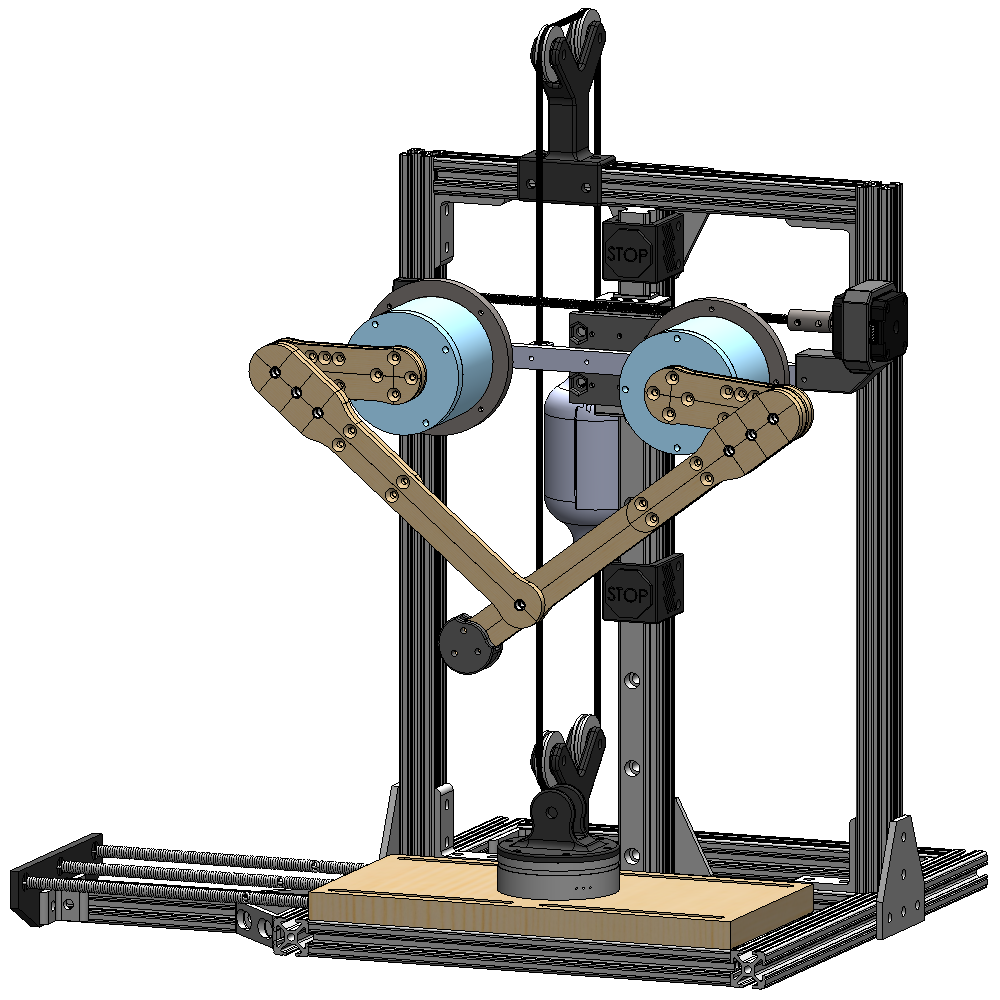
Design and Analysis of a Mode-Transitioning Robotic Leg and Test Bed for a Hexapod Rescue Robot
2024-2025 - Spring
Team: 37
Team Members
William Harris
Lucas Yager
Giovanni Bernal Ramirez
Hwuiyun Park
Elias Smith
Endovascular Device for Rapid Blood Clot Removal
2024-2025 - Winter
Team: 12

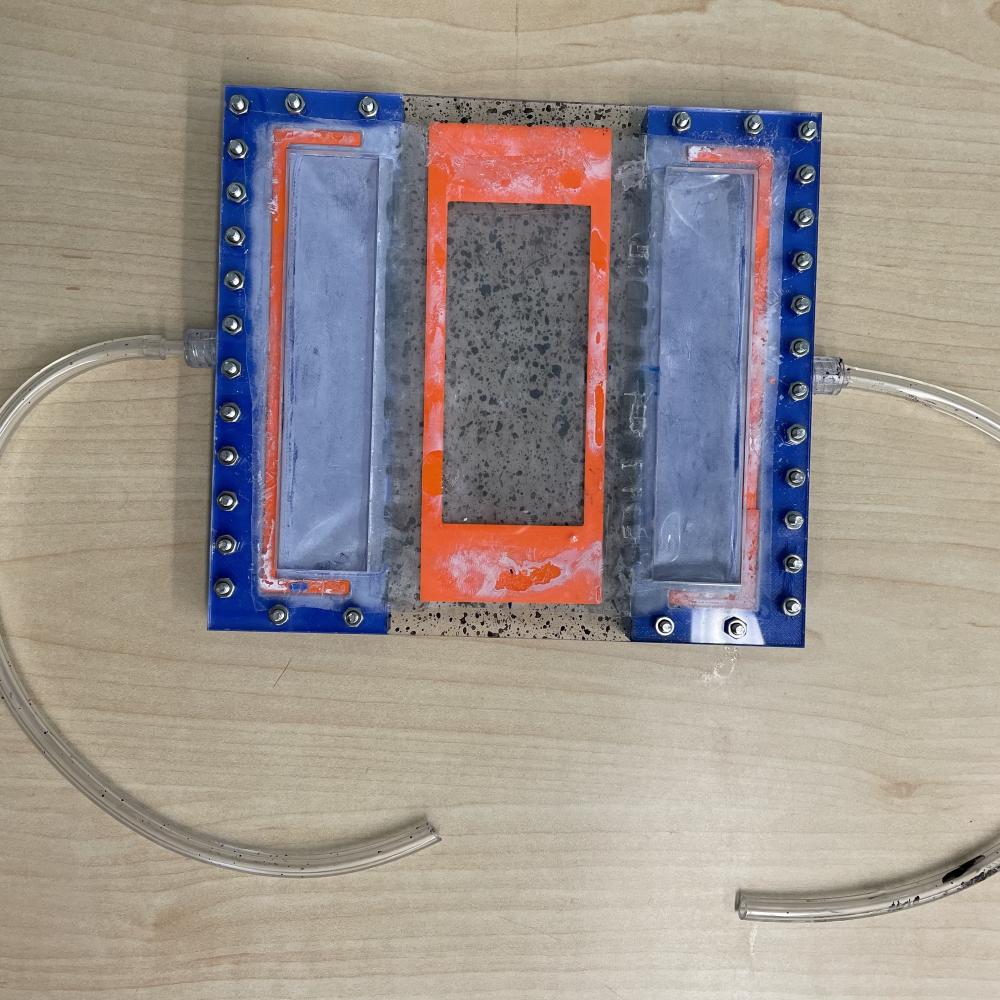
Carbon Blade Carbon Capture
2024-2025 - Spring
Team: 15
Team Members
Ian Cosgrove
Charlie Frank
Juncheng Li
Alexandra Rodriguez
Konrad Stromayer


Materials Break Up
2024-2025 - Spring
Team: 16

Cellxercise Machine
2024-2025 - Spring
Team: 2

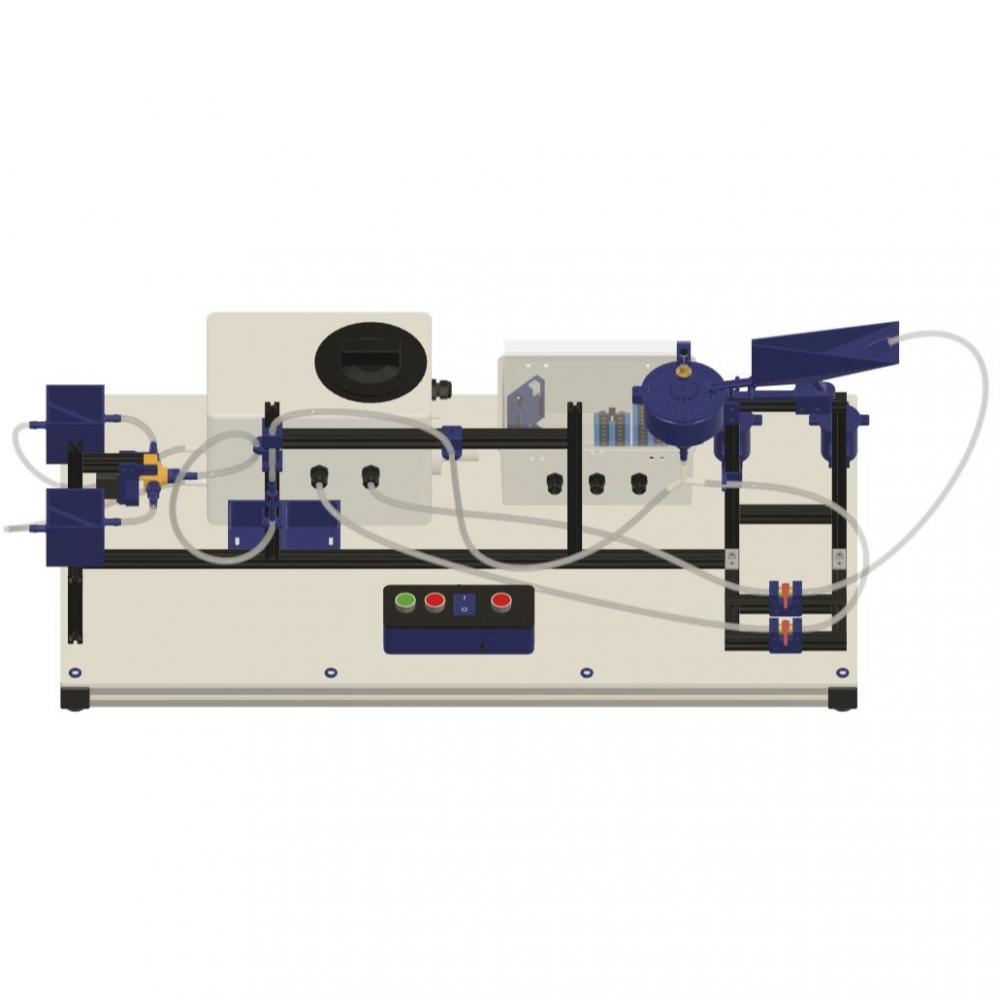
Sample Throughput Optimization for Thermal Desorption Spectroscopy
2024-2025 - Winter
Team: 15
Team Members
Ethan Greene
Jamie Lee
Saul Rios
Leo Serbinov
Vedanth Talla
Brayden Wong

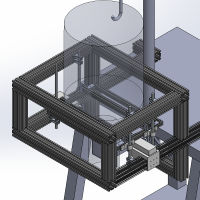
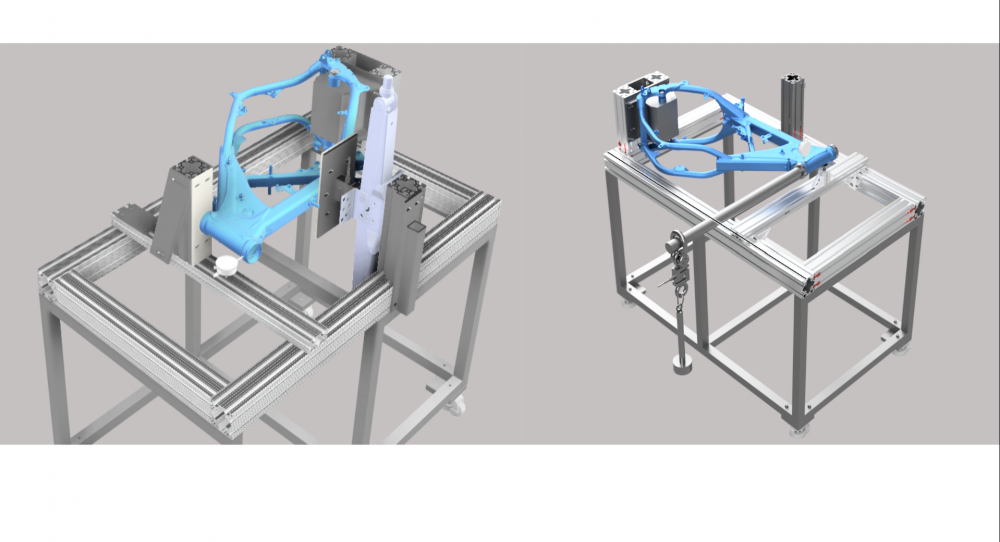
ShockE Frame Stiffness Test Fixture
2024-2025 - Spring
Team: 19

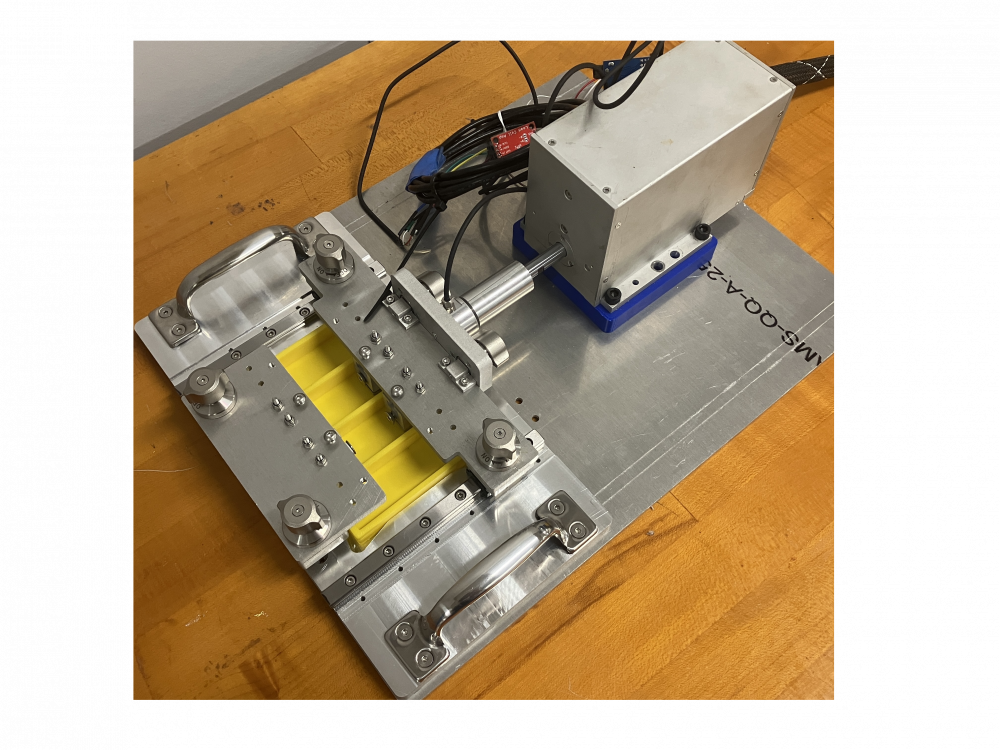
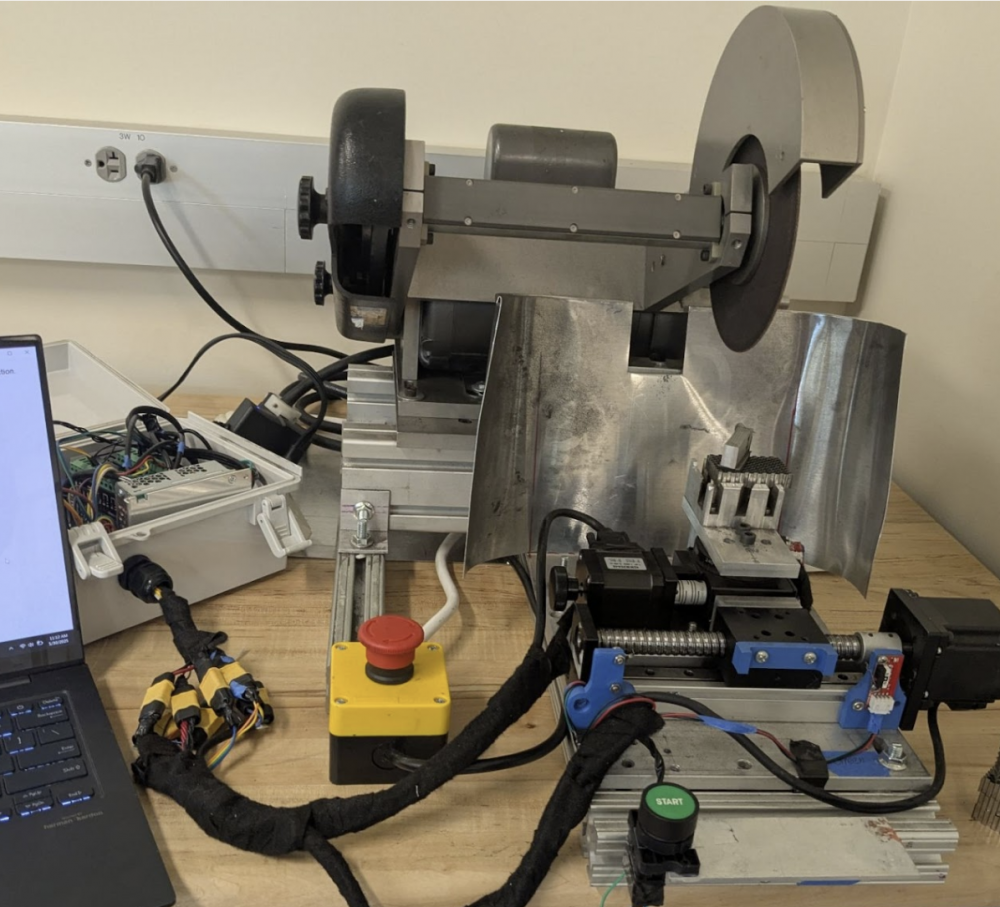
Resistive Torque Measurement Apparatus
2024-2025 - Spring
Team: 24




Automating the Cutting Process Hi-Tech Honeycomb
2024-2025 - Spring
Team: 38
Team Members
Rowan Barg
Micah Borg
Elijah Matthews
Daniel Sun
Acoustic Modem Integration onto Wave Glider USV
2024-2025 - Winter
Team: 16

SomnoStay - A Novel Oral Appliance for Obstructive Sleep Apnea
2024-2025 - Spring
Team: 7

NIWC PAC UAS Launch and Recovery
2024-2025 - Spring
Team: 26
Team Members
Parker Amano
Gregory Garner
Gabriel Lepage
Bhodivista Yohn

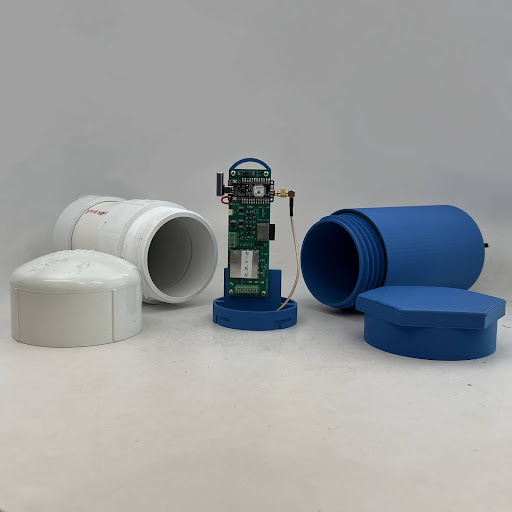
Outdoor Low Power Measurement Equipment Enclosure (ENTS Enclosure)
2024-2025 - Winter
Team: 11
Team Members
Fayza Elshafie
David Fisher
Michael Gonzalez
Benny La
Elliot Snyder

Manual In-Pipe Robot Surrogate for Autonomy Development
2024-2025 - Spring
Team: 18
Wave Energy Converter
2024-2025 - Spring
Team: 25


DM Consulting - Dry Dock Block
2024-2025 - Spring
Team: 8


LightLok - Burn Prevention
2024-2025 - Winter
Team: 13
Solar Wind Tunnel
2024-2025 - Spring
Team: 32
Team Members
Benjamin Marsden
David Bori
Max Gonsalves
Rachel Gillespie

StableWind Technologies
2024-2025 - Spring
Team: 17
Team Members
Wills Moore
Christopher Mansfield-Reid
Trevor Marshall
Christopher Cordano
Jintong Han
GA Autoloader Recovery Fusion
2024-2025 - Spring
Team: 9



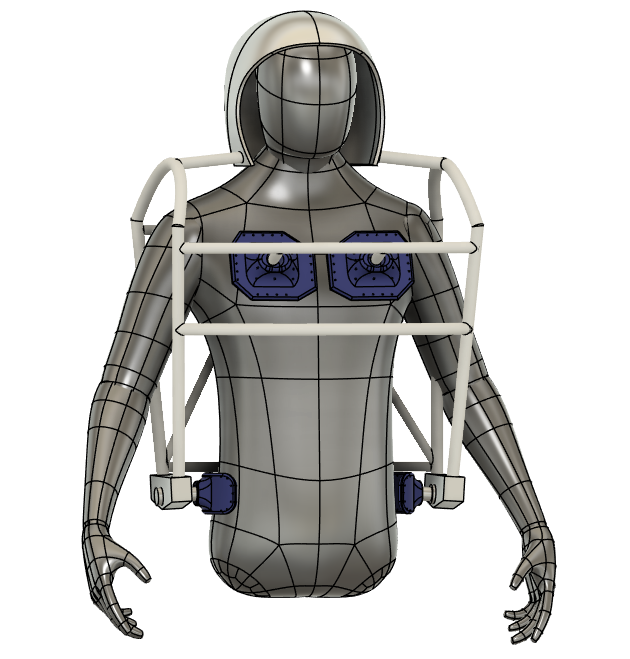
Halo Helmet Platform
2024-2025 - Winter
Team: 9
This project introduces a helmet-integrated roll cage that redistributes impact forces away from the head and neck. Anchored to the upper body via a harness, the system disperses forces more effectively, reducing the risk of traumatic brain and spinal injuries.
Regenerative Trailer Braking System
2024-2025 - Spring
Team: 3


Device to Assess Nitric Oxide at PoC
2024-2025 - Spring
Team: 20
Team Members
Fernando Rico
Li-Pin Chang
Armaan Goklani


Hi Tech Honeycomb Automation
2024-2025 - Spring
Team: 10

