Previous ASME Award Winner
Recent Departmental Runner Up Awards
Capstone Design Projects
OceanWell Multistage Water Filtration System
2024-2025 - Winter
Team: 10


Triton-Ai Racquet Ball Launcher Magazine and Control
2024-2025 - Spring
Team: 34


Venous Ulcer Wound Compression Garment
2024-2025 - Spring
Team: 27

SE Scribing Solar Panels
2024-2025 - Spring
Team: 11


Automated Graphene Transfer
2024-2025 - Winter
Team: 14

Antibiofouling System for Moored Marine Instruments
2024-2025 - Spring
Team: 23


Heating Stage for Nanomaterials
2024-2025 - Spring
Team: 28
Team Members
Duy Cao
Gautam Ganesh
Alice Khalil
Johnny Mendoza

UCSD Med Absorbable Springs
2024-2025 - Spring
Team: 12

Material Transfer Cleaning
2024-2025 - Winter
Team: 2
MRI Stereo
2024-2025 - Spring
Team: 5

Scripps Anemometer Drone
2024-2025 - Spring
Team: 41

UCSD Med Nerve to Smile
2024-2025 - Spring
Team: 13


Endoscopic Multiload Clip Applier
2024-2025 - Winter
Team: 5


Quantum Engineered Nano Device
2024-2025 - Spring
Team: 4
Team Members
Scott Ceklarz
Kalie Garcia
Satchin Narasimhan

Unlocking the Door with AI
2024-2025 - Spring
Team: 40

UCSD Med Low Cost Microsurgery Instruments
2024-2025 - Spring
Team: 14

Flow Enabled Energy Generation Device
2024-2025 - Winter
Team: 4
Team Members
Ashley Campbell
Maime Grace Barnard
Gabrielle Scott
Markus Gokan
Justin Kwak


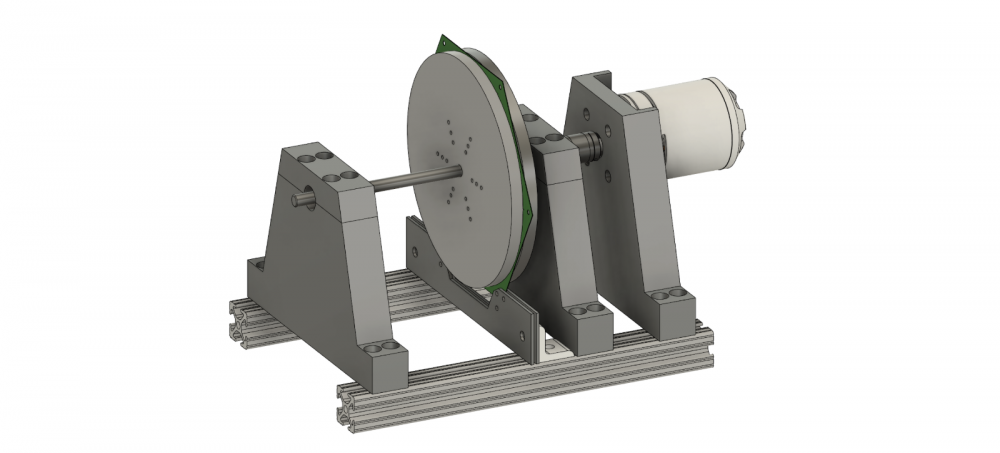
Random Positioning Machine 2.0
2024-2025 - Spring
Team: 31



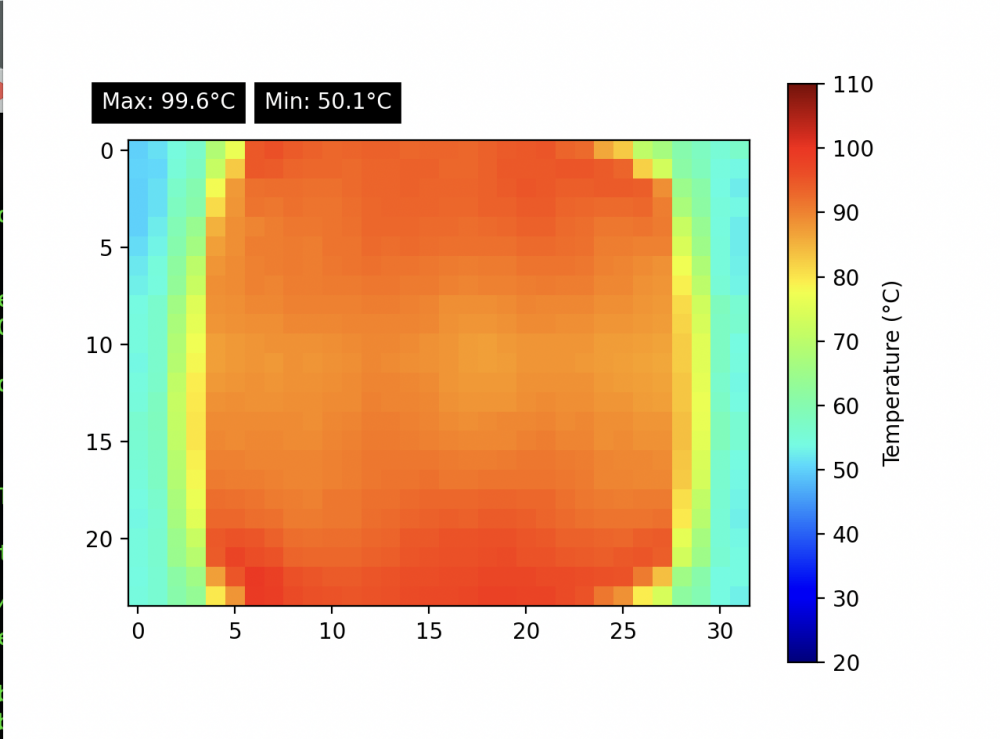
Cohu Temperature Gradient Tester
2024-2025 - Spring
Team: 36
Automated Tracheal Cuff Pump
2024-2025 - Winter
Team: 6

Jacobs Hall Clock Revival
2024-2025 - Spring
Team: 33
Team Members
Jonathan Dela Cruz
Irving Ding
Fatima Fazli
Fernando Gochicoa
Lacey Potter

Improved Punch Biopsy Tool
2024-2025 - Spring
Team: 35

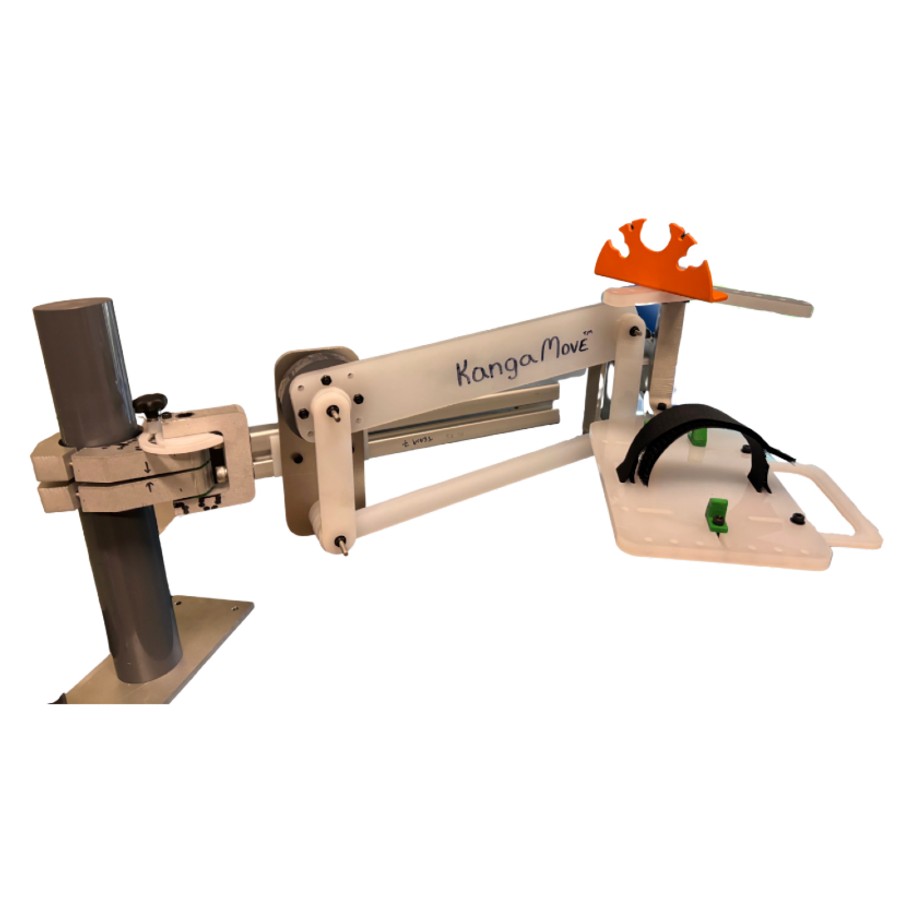
KangaMove Parental Skin-to-skin Contact Support
2024-2025 - Winter
Team: 7
Autogyro UAV
2024-2025 - Spring
Team: 22

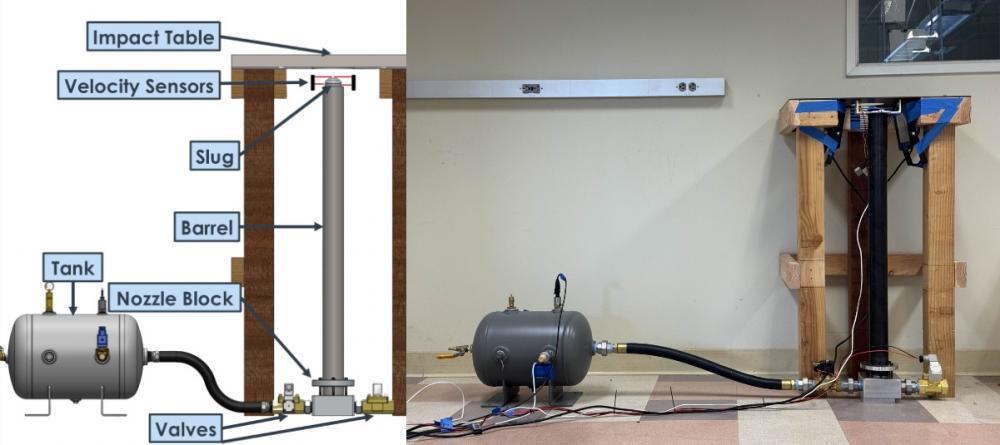
ATA Shock Test Table Firing Mechanism
2024-2025 - Spring
Team: 1
Team Members
Manu Mittal
Nina Abraham
Marco Rincon Villanueva
Anne Marlow
Reggie Estrella
Unmanned Aerial Systems Hybrid Powertrain Testbed
2024-2025 - Winter
Team: 3
Team Members
Daniel Cruz-Espada
Jason Holtkamp
Joud Bukhari
Kenneth Su
Shivharsh Kand
Ziad Gari

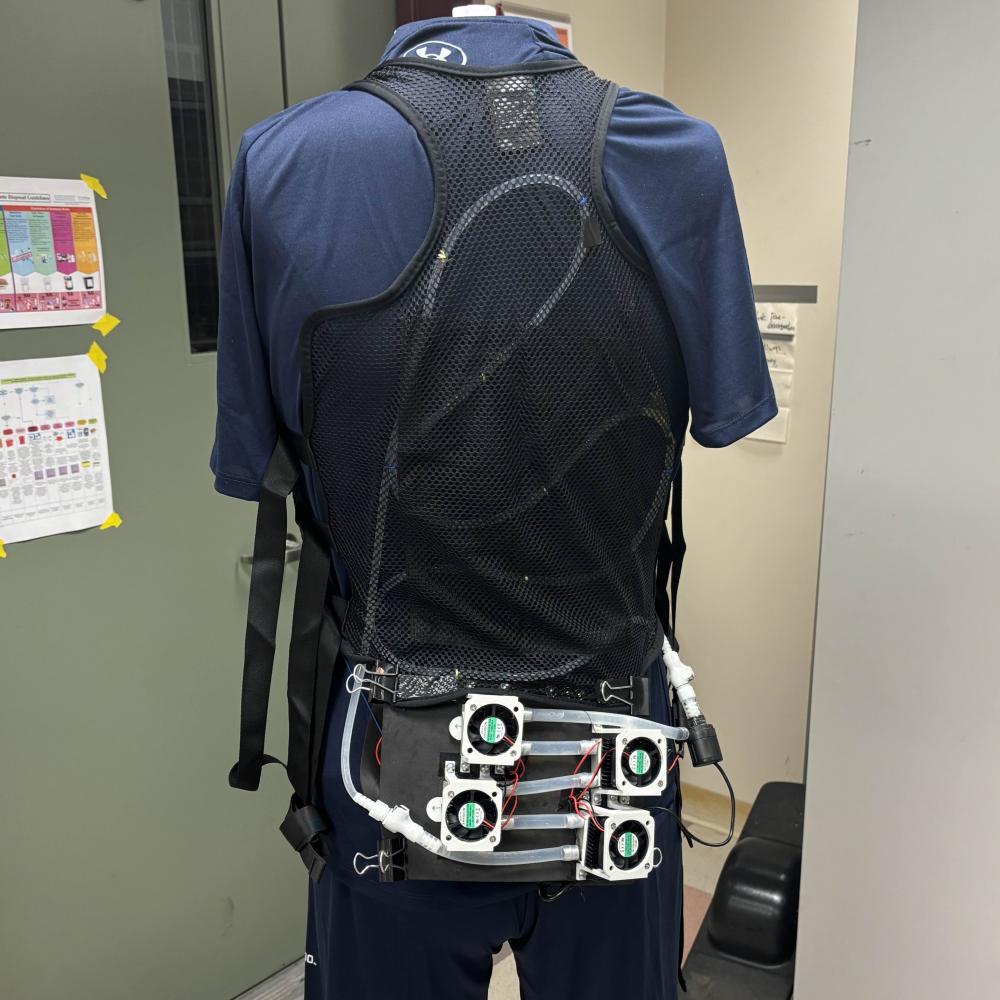
Portable TEC-Based Liquid Cooling Garment
2024-2025 - Spring
Team: 30
Team Members
Aaron Lo
Morgan Laney
Fatima Rivera
Karla Ramirez
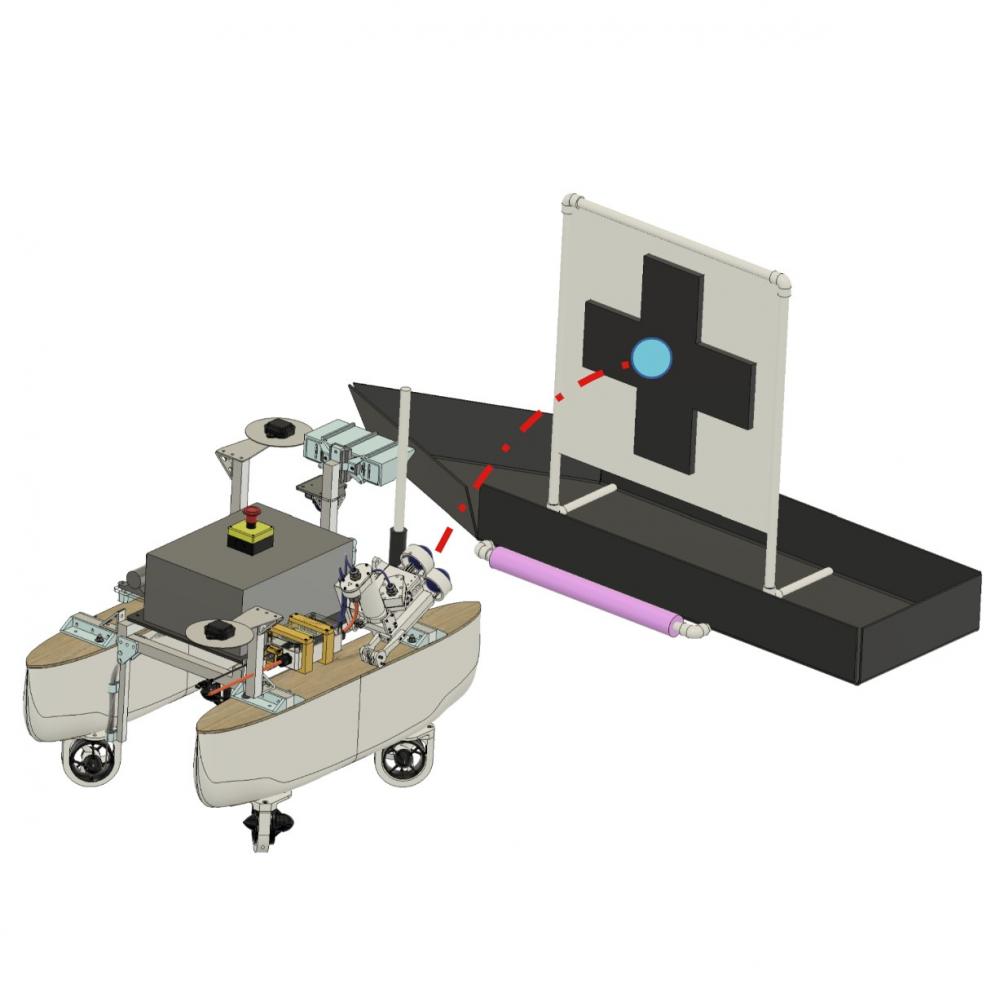
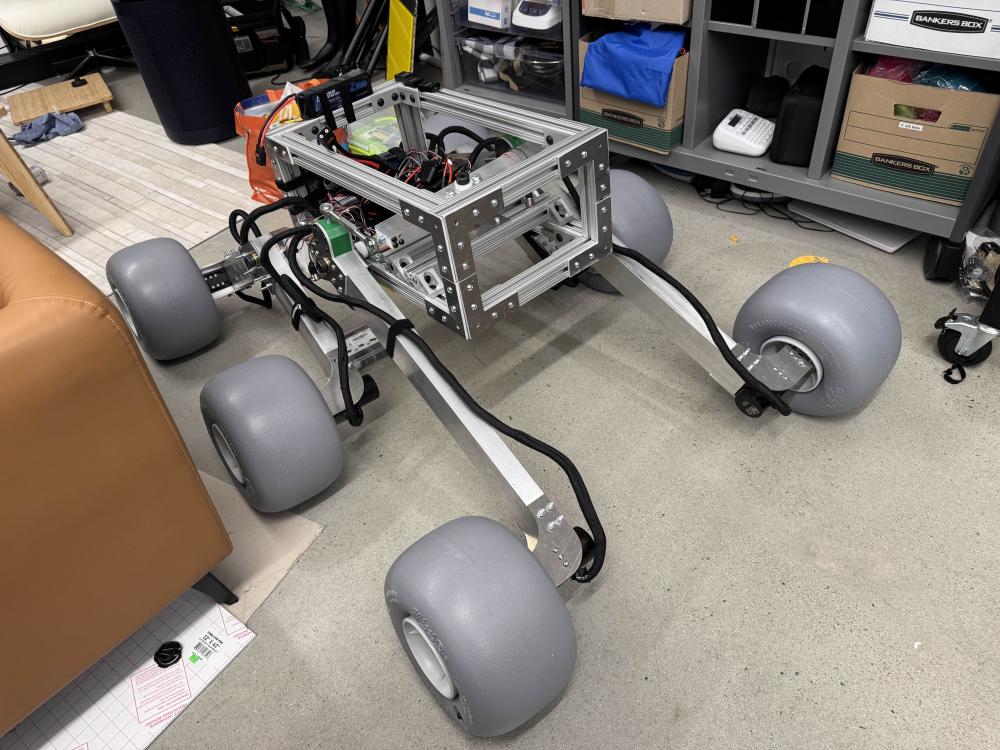
Lifesaver Project Rover Module
2024-2025 - Spring
Team: 39

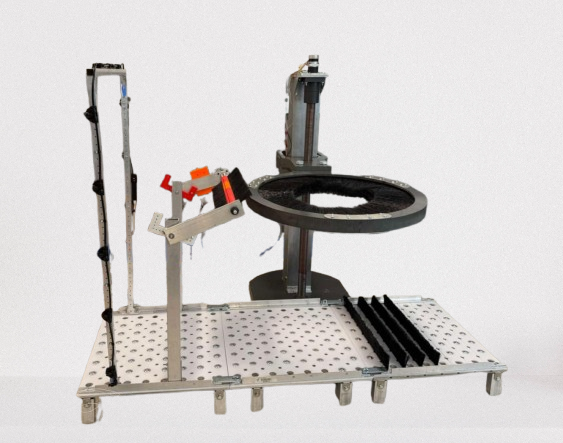
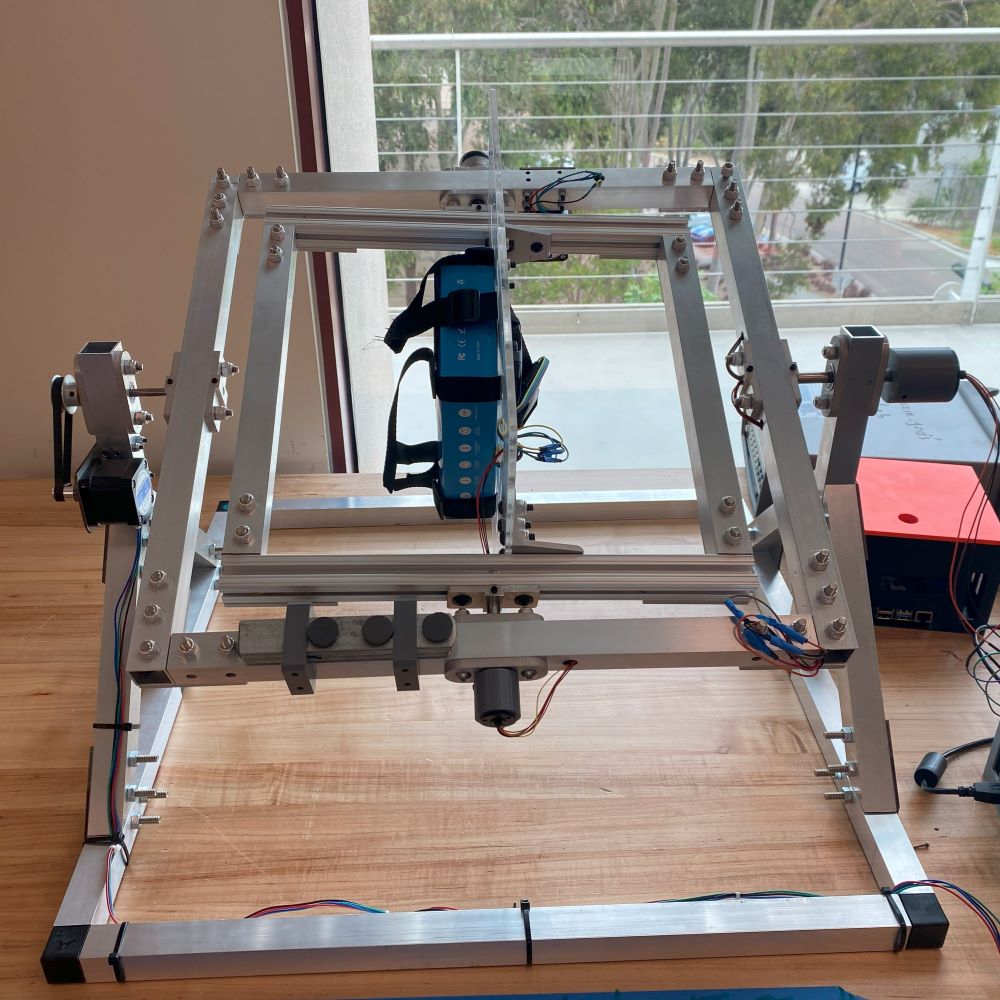
Random Positioning Machine
2023-2024 - Spring
Team: 26
Team Members
Andrew Copeland
Manuel Figueroa
Nicholas Maekawa
Nicholas Ratto
Vladimir Rubtsov
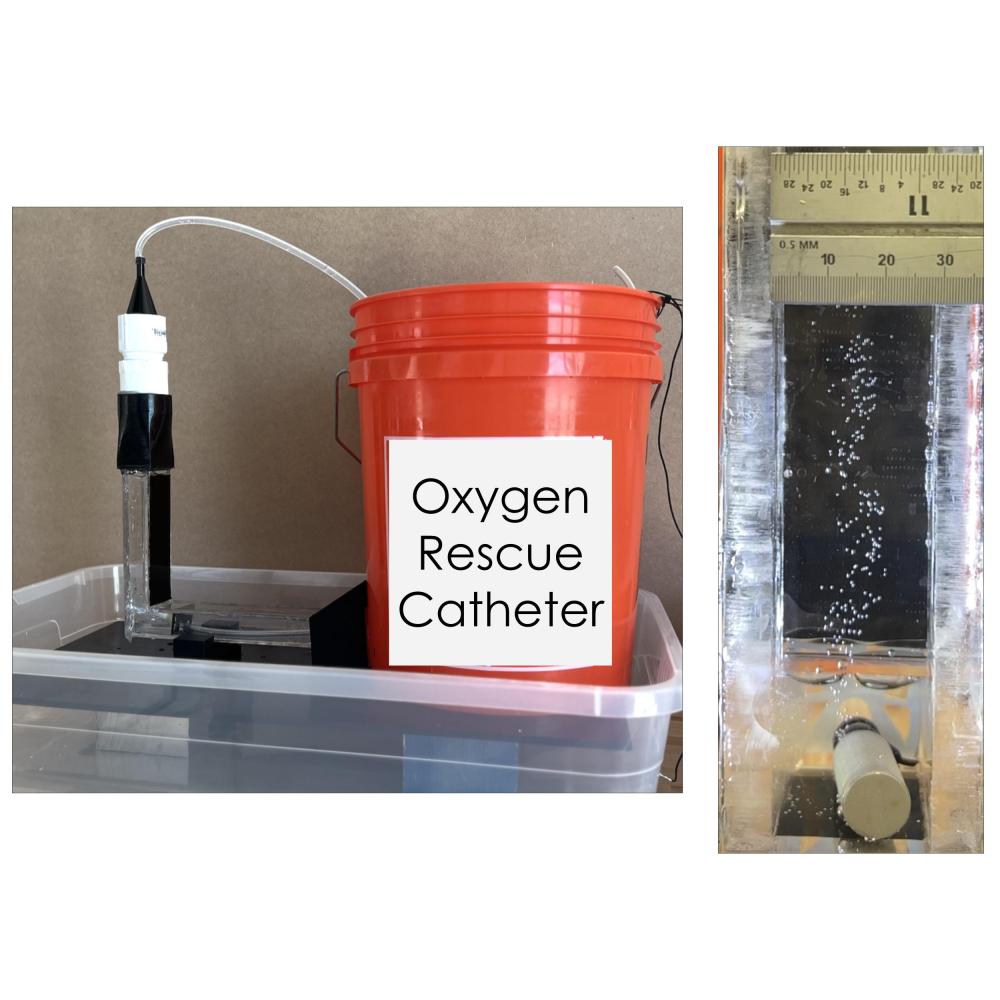
Oxygen Rescue Catheter
2023-2024 - Spring
Team: 10